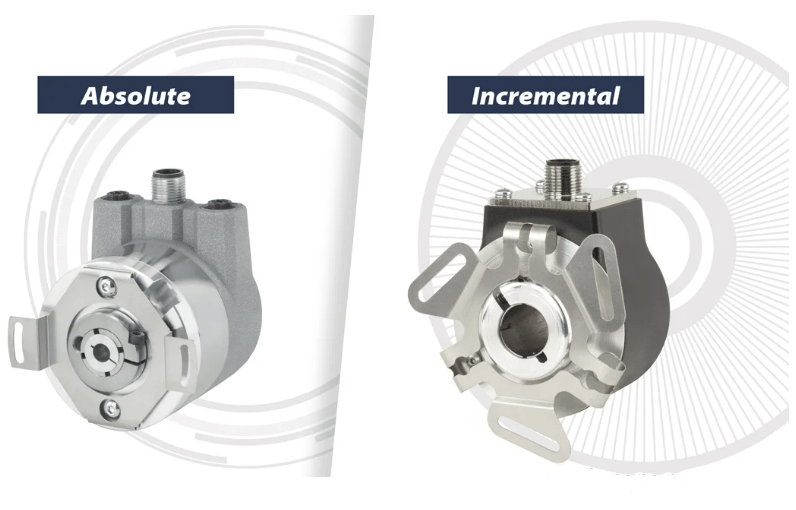
我们在选择编码器时,经常考虑选择增量式还是绝对式的。不论是线性编码器还是旋转编码器都有这两种方式可供选择。
实际上,考虑的核心一个问题就是,断电重启后需不需要立即获取当前实时的准确位置。如果需要,那就选择绝对式,比如机器人的关键轴,上电是需要准确知道它的实时位置的。还有一些机床,出于安全等因素一般也选用绝对式的编码器。
当然,如果条件允许在断电后再次回零的场合,那就可以选择增量式编码器,相比较而言,增量式的成本更有优势。
从根本上说,增量编码器和绝对编码器的功能是相同的:它们测量运动的关键要素,包括速度、位置、停止、启动和距离。虽然绝对编码器通常用于需要极高精度、复杂编程和安全性的高级系统中,但两种编码器在类似的行业中都有应用。
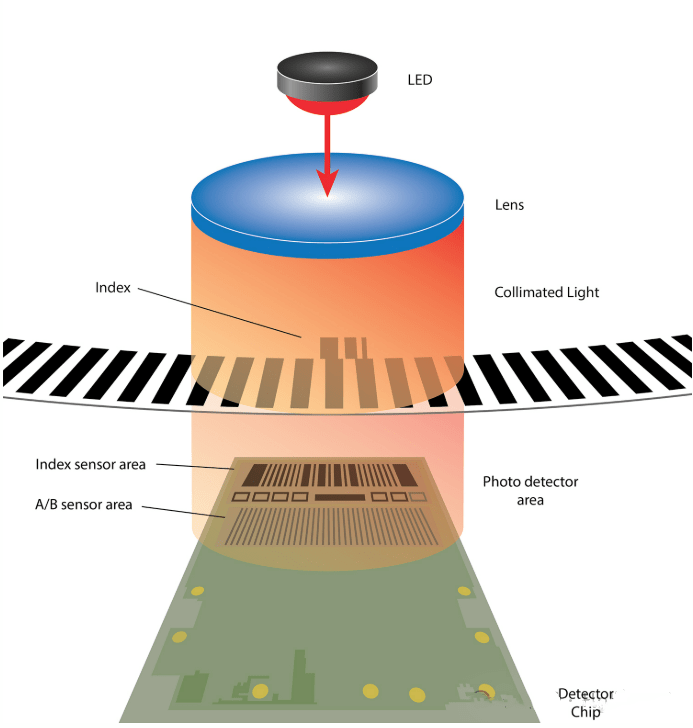
增量编码器(Incremental encoder)
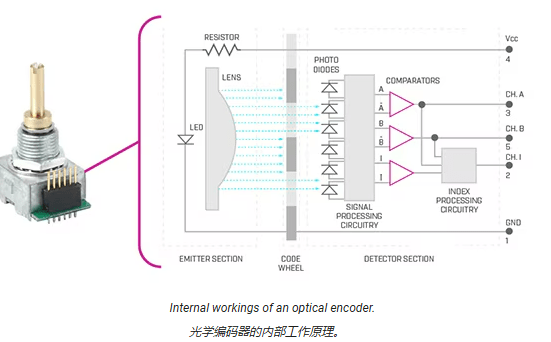
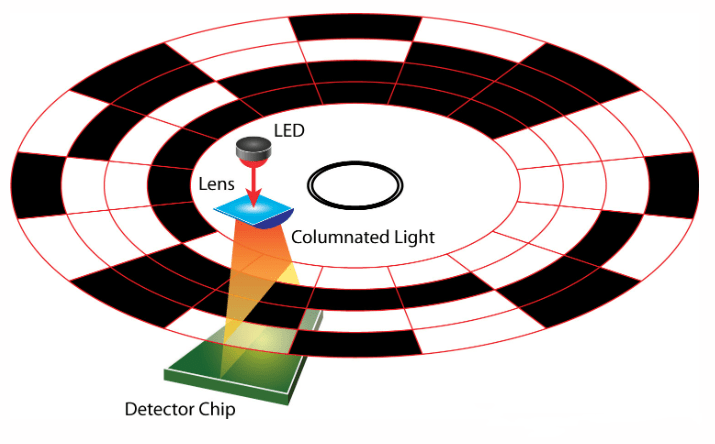
下图是一个典型的增量光编码器的工作原理图:
绝对编码器设计并赋予了更加复杂的标记、刻度或槽。增加的细节使得能够提供更详细的位置反馈。具体来说,编码器上的每个位置都有一个独特的代码。
绝对光编码器使用 LED 阵列、光学盘和光电传感器,就像增量编码器一样,但盘上的图案略有不同。
绝对光编码器可以使用一系列线条和窗口以及多个带状区域来创建一个二进制模式,从而给出一个独特的位置。
一些设计使用多个条带,在圆盘的每个点上创建一个独特的模式。例如,根据上面的图片,你可以想象每个位置要么是 1 要么是 0,这取决于光电传感器是否检测到 LED 发出的光。圆盘当前的位置是 1001,这个组合在轴旋转中不会出现在其他地方。
绝对编码器和增量编码器在运动控制系统中各有不同的用途。它们的区别在于如何跟踪位置、应对断电、提供精度以及适合各种应用。
数据输出和位置跟踪
绝对编码器在所有时间都提供精确的位置值,即使在断电后也是如此。它们消除了重新校准的需要。
增量编码器跟踪相对位置变化,并在启动时需要一个基准位置来确定绝对位置,因此在需要位置记忆的应用中效率较低。
功率和内存依赖性
绝对编码器内部存储位置数据,确保即使在断电后,运动控制系统也能保持准确性。
增量编码器在电源关闭时会丢失位置数据,需要重新定位才能恢复操作,这在某些应用中会导致停机时间。
分辨率和精度
绝对编码器通常提供更高的分辨率和更高的精度,使它们成为机器人和 CNC 机器等精密应用的理想选择。
增量编码器可以实现高分辨率,但需要外部计数器来连续跟踪运动,这可能会随着时间引入误差。
成本和复杂性
绝对编码器由于其先进的电子设备和数据存储能力更昂贵,但它们提供了长期的准确性和可靠性。
增量编码器成本效益高且实现简单,因此在不需要绝对定位的应用中很受欢迎。
速度和性能考虑
增量编码器优化用于高速应用,为需要快速运动检测的系统提供快速响应时间。
绝对编码器优先考虑精度而非速度,使其适用于需要精确位置保持的关键应用。
应用环境
绝对编码器在频繁断电重启的环境中表现良好,确保无需重新校准即可保持一致的操作。
增量编码器更适合始终有参考位置的应用,例如传送带系统和电机反馈。
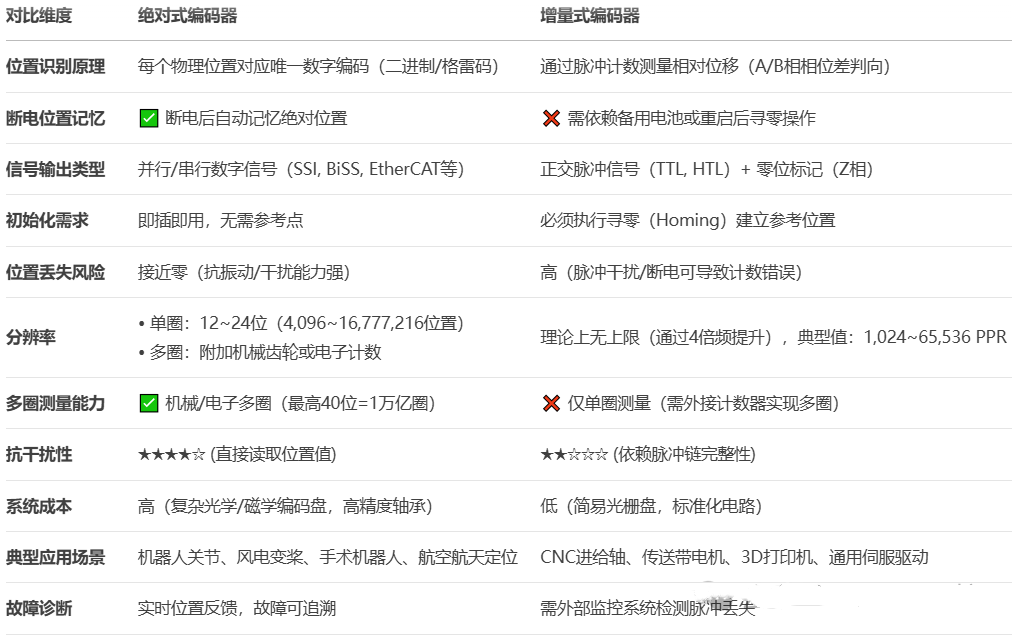
根据各方面资料来源,总结参考对比如下表所示:
选择绝对编码器还是增量编码器取决于应用需求、预算和环境条件。绝对编码器提供连续的位置跟踪和可靠性,而增量编码器则提供经济有效的运动跟踪解决方案。了解它们之间的差异可以确保在自动化、机器人技术、制造及其他工业应用中实现最佳性能,从而提高效率和精度。
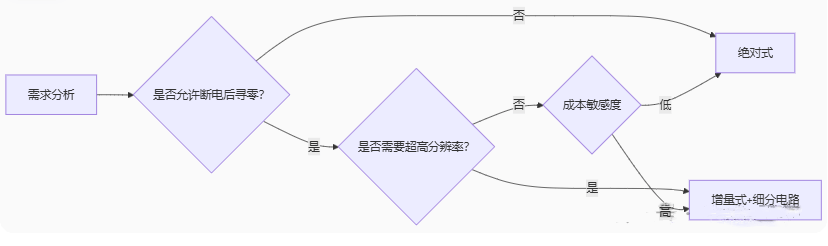
最后,关于如何选择,下方一张图逻辑清晰,仅供参考: