增量编码器通过每转产生特定数量的脉冲(PPR)并在编码器旋转时计数这些脉冲来确定旋转位置。PPR额定值表示分辨率,通常是选择增量编码器时最重要的因素。但是,您如何确定特定应用程序需要什么样的PPR呢?幸运的是,建立所需的PPR并不困难——只需遵循一些原则。
测量线性运动时,每转所需的脉冲数通过将螺杆的导程除以应用所需的线性分辨率来计算。相反,对于具有给定PPR的编码器,通过将螺旋导程除以PPR来计算得到的线性分辨率。请记住,如果X2或X4编码被使用,这应该被考虑到PPR数中。例如,如果所需的线性分辨率要求PPR为5000,并且使用的是X4编码,则所选编码器的PPR应为1250 (5000/4)。


如果使用轮子或滚轮测量行程,则可能需要校准常数,这取决于所需的显示分辨率。校准常数的计算方法是将车轮或滚轮周长除以编码器的PPR,再乘以所用的传动比(如果有)。然后乘以从车轮/滚轮周长单位转换到显示器所需单位所需的任何转换。(例如,乘以1000可将周长(米)转换为显示单位(毫米)。
K =校准常数 C =车轮或滚轮周长(通常为英寸或米) G =齿轮比 N =编码器PPR
使用校准常数或比例因子具有引入舍入误差的缺点,该误差将在编码器的许多周期中累积。为了避免这种情况,请选择PPR是被测值的偶数倍的编码器。例如,如果编码器的一次旋转等于12英寸,则选择1200 PPR编码器。
速度
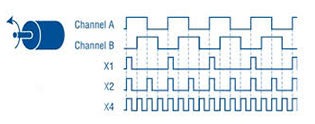
决定每转所需脉冲数的另一个重要因素是编码器的最大速度——包括机械速度和电气速度。机械速度限制基于在不对编码器造成潜在损坏的情况下可以获得的最大速度。电气速度限制由编码器电子设备的最大频率响应决定,即电子设备在“开”和“关”之间切换的速度机械速度或电气速度这两个值中的较低值表示编码器可以转动的最大速度。为了将电气速度转换为rpm,频率响应除以PPR并乘以60(秒/分钟)。同样,如果使用X2或X4编码,PPR必须分别乘以2或4。

例如,假设一个编码器的额定功率为100 PPR,最大机械速度为3000 rpm,最大频率响应为100 kHz。电气速度为60,000转/分,因此机械速度为3000转/分是限制因素。

编码器只是完整机电系统的一部分,因此确保编码器的最大速度不超过编码器所驱动器件的最大输入频率也很重要。